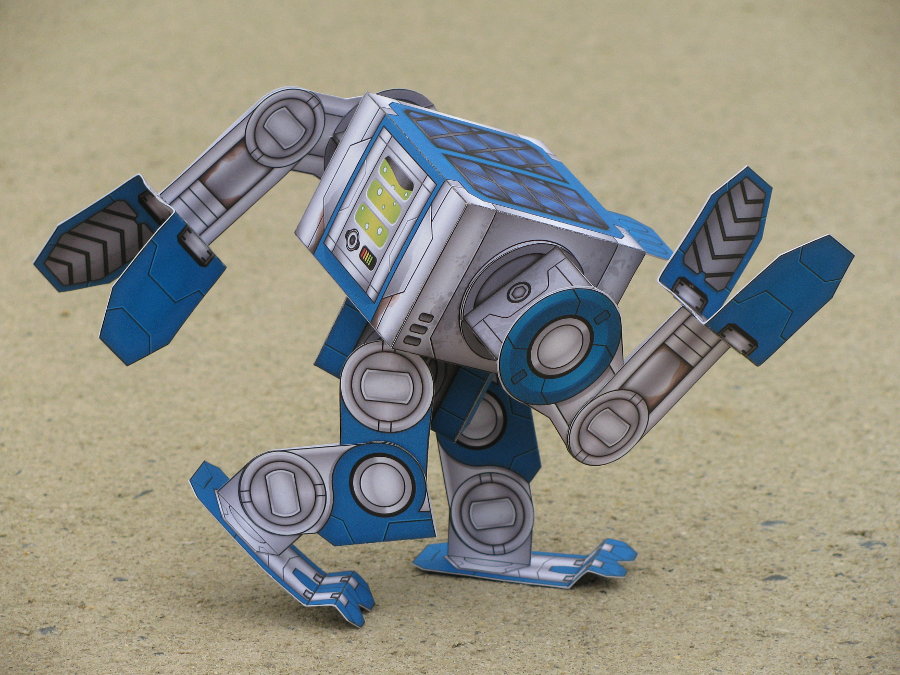
Как сделать шагающего робота своими руками видео

КАК СДЕЛАТЬ РОБОТА КОТОРЫЙ ХОДИТ ПО КРУГУ
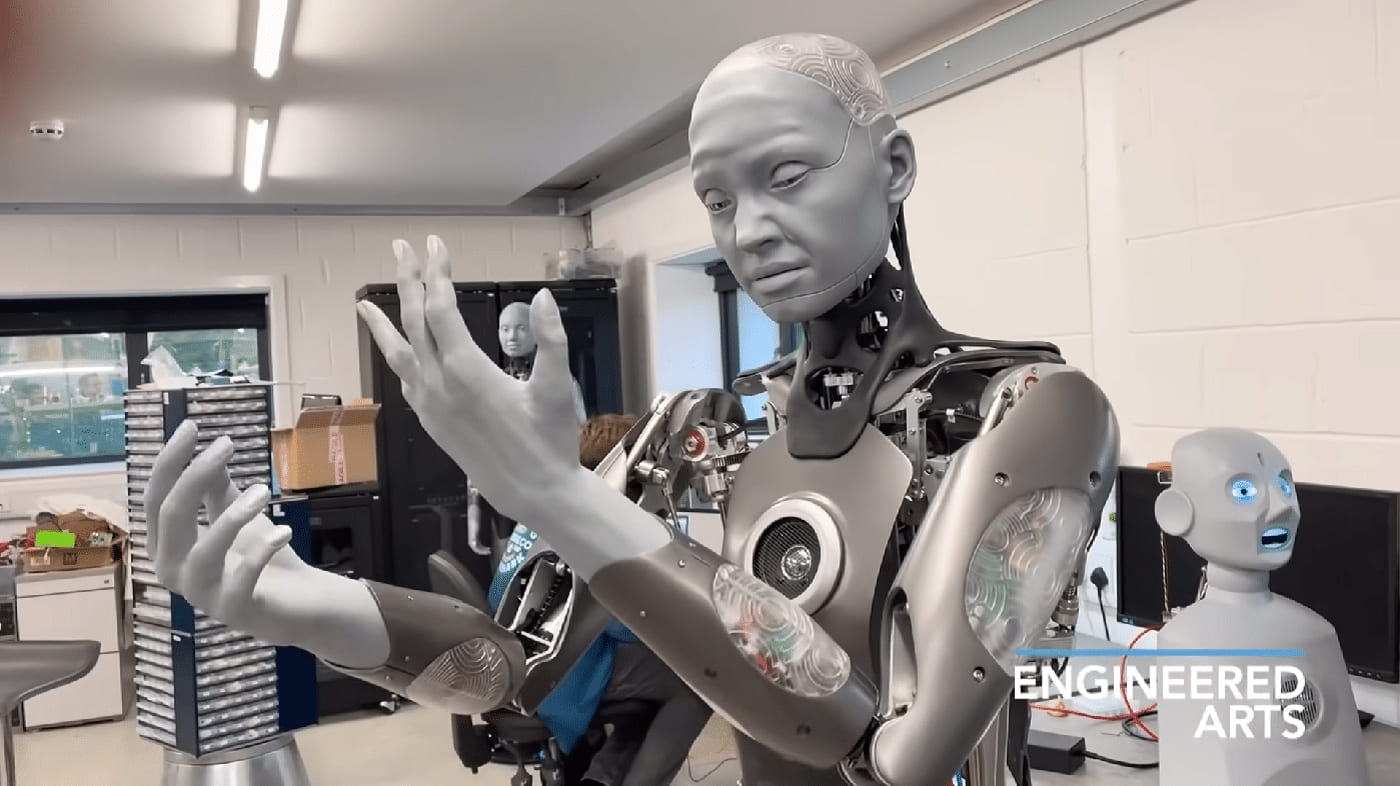
Робот обычно получает информацию о состоянии окружающего пространства посредством датчиков технических аналогов органов чувств живых организмов. Робот может самостоятельно осуществлять производственные и иные операции, частично или полностью заменяя труд человека [1] [2]. При этом робот может как иметь связь с оператором , получая от него команды ручное управление , так и действовать автономно, в соответствии с заложенной программой автоматическое управление. Назначения роботов могут быть самыми разнообразными, от увеселительных и прикладных и до сугубо производственных. Внешний вид роботов разнообразен по форме и содержанию, может быть каким угодно, хотя нередко в конструкциях узлов заимствуют элементы анатомии различных живых существ, подходящие для выполняемой задачи.












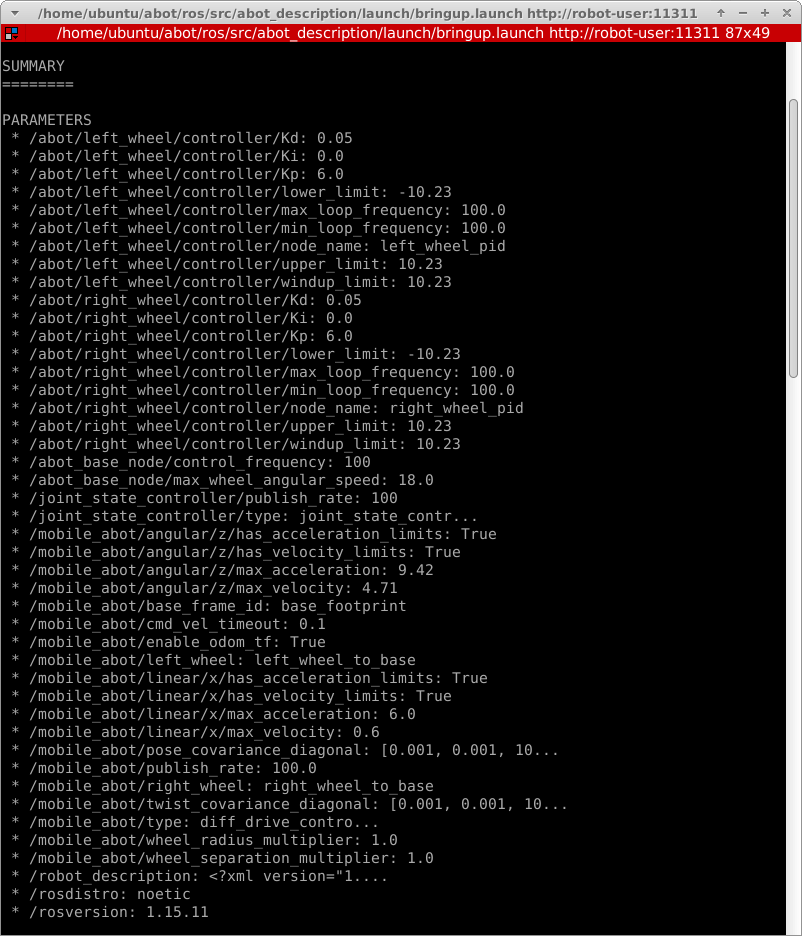
В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System. Это будет наш первый мобильный робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись.
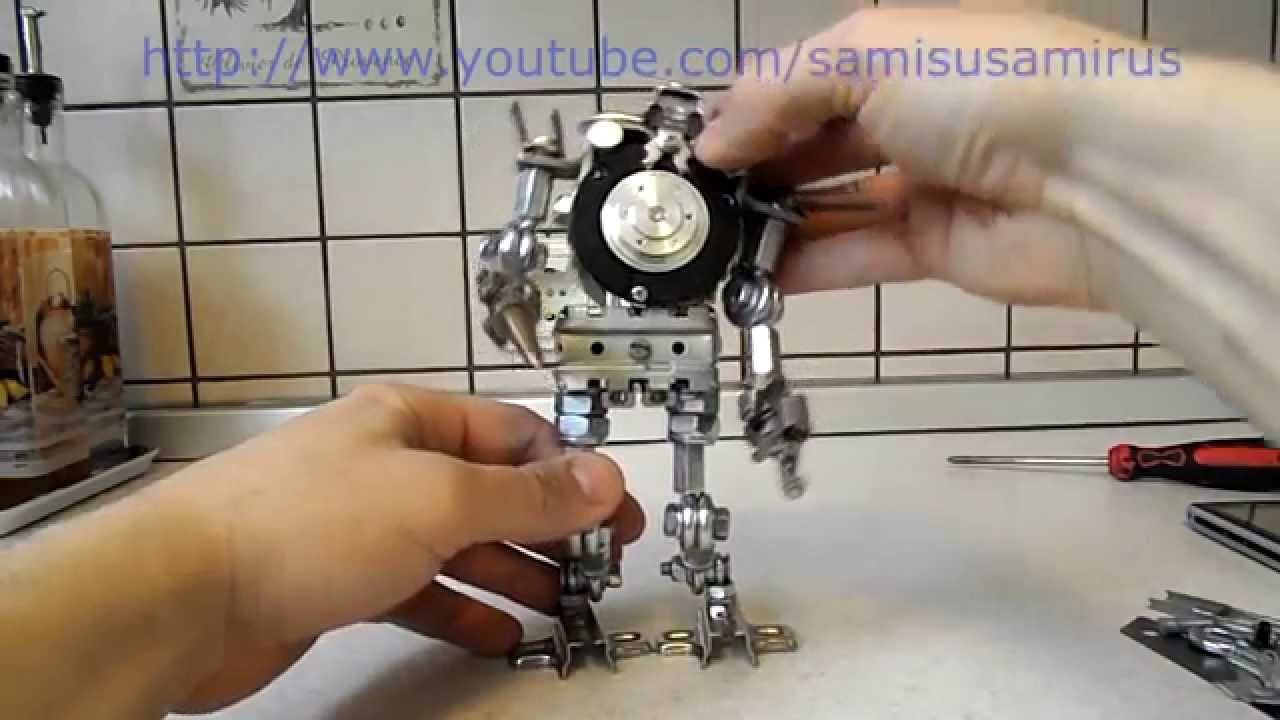





Робот — самостоятельное и, часто, автономное устройство, работающее по внутренней программе. Почти живое существо, только с электронными мозгами. Роботы могут многое, но, все-таки не более того, что в них заложено их создателем. Насмотревшись видео про роботов, решил сам попробовать сделать робота из простой игрушки. Что для этого нужно?

_large.png)